Create Your First Project
Start adding your projects to your portfolio. Click on "Manage Projects" to get started


Sonar Stabilization
Location
UC Santa Barbara
Date
April 2023 - June 2023
Two of my classmates and I designed a hydrofoil system that successfully reduced rotation of sonars for more accurate data collection. This project was for a six-week mini capstone project in an introductory design class that culminated in a design fair where we won most innovative project.
Currently, sonar devices are deployed by attaching them to a metal rod that is secured to the side of a boat. This method subjects the sonar to high degrees of rotation on all three axes, mostly due to waves hitting the side of the boat and forcing the sonar off of its desired path. As it rotates and this path is skewed, data is taken in places that have already been measured while completely missing other areas. When the data is processed, this results in inaccurate coordinates of corrupted features. Surprisingly, this is the universal method of sonar data collection for researchers who do not have access to large research vessels.
My team and I decided to create a solution to stabilize these devices so that more accurate data can be taken when imaging our oceans. We were familiar with hydrofoil surfing and wondered if we could redesign the wings of a hydrofoil to accommodate a load on the bottom, as opposed to a surfer acting as the load on the top.
We aimed to lift the sonar close to the surface of the water so that we could maintain a known origin of measurement. This stabilization device would be towed behind the boat so that it would no longer be subjected to the interaction between the ocean’s waves and the boat itself. We would produce a scaled-down model and use a remote-controlled (RC) boat to mimic the wake of a speedboat to ensure that a sonar-shaped load would be more stable on our device than with the current method of deployment.
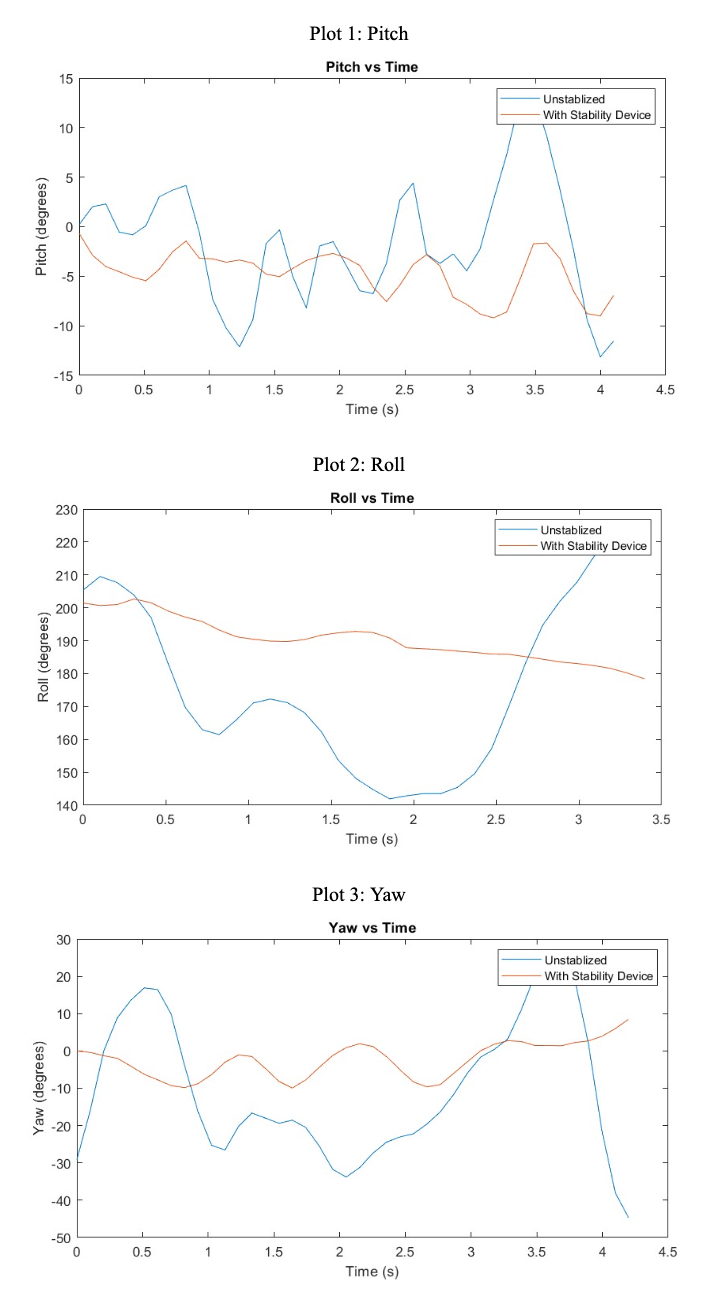
We iterated through 5 3D printed prototypes, measuring rotation with a bluetooth accelerometer that could measure 3-axis angle, angular velocity, acceleration. We first attached the accelerometer to the load and secured it to the side of the boat to replicate the current method of sonar deployment. We then compared this data to the stability of our device by attaching the accelerometer to the hydrofoil.
It was clear from the plots that the final iteration of our stability device was successful in stabilizing a sonar-shaped load on all three rotational axes. Therefore, we were confident that if our prototype was to be scaled up, a sonar would be more stable on our device than by using the current method of deployment.